3.3.2. Corner Detection 탭
3.3.2. Corner Detection 탭
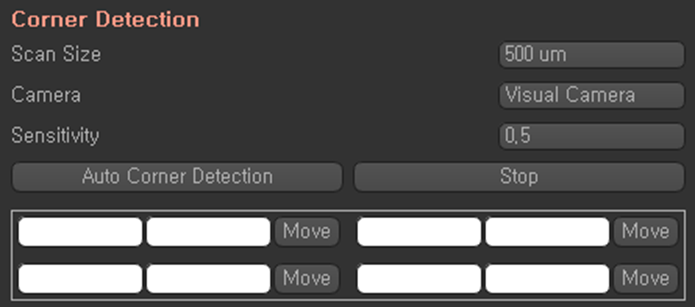
Figure 41. Corner Detection 탭
Chip Image와 실제 DUT의 좌표를 동기화하는 좌표Set-up 작업의 편리성을 위해 부착된 Chip의 4 모서리를 찾아주는 기능입니다. Pulsed Laser 장비 GUI는 Chip의 이미지를 활용하여 여러가지 기능들을 제공합니다. 이를 사용하기 위해서는 Chip의 이미지와 스테이지의 위치의 4점(4point)을 매핑해 주어야 합니다. 이 작업 시에 사각형 반도체의 네 모서리를 찾아주는 해당 기능을 사용 할 수 있습니다.
- Scan size: XY축으로 스캔할 사이즈, Chip의 사이즈 보다 크게 설정.
- Camera: 해당 기능을 사용할 때 사용할 카메라
- Sensitivity: 해당 기능은 이미지의 밝기 차이를 사용하는데 이때 밝기 차이의 기준이 되는 수치. 해당 기능이 오작동 할 시 이 수치를 변경.
- Auto Corner Detection 버튼: 기능 시작
- Move 버튼: 탐색한 4개의 포인트를 해당 버튼을 통해 해당 포인트로 이동
사용 순서 예시
- Auto Focus기능을 이용하거나 수동으로 대략적인 Focus맟춤. (Chip 내부와 외각이 구분되는 정도)
- Chip의 내부로(대강 중심) XY Stage를 이동.
- 반도체 Chip의 사이즈를 고려하여 Scan size를 설정.
- Auto Corner Detection을 클릭하여 기능을 수행. 자동으로 Stage가 상하좌우로 이동하며 코너를 탐색.
- 탐색된 결과값을 Move 버튼을 통해 확인.